11月5日に福島ロボットテストフィールドにて、のり面吹付工の省力化技術「スロープセイバー」の遠隔操作システムの実証試験を行いました。
のり面吹付工のロボット施工技術である「スロープセイバー」を、インターネット経由での遠隔操作可能としたことにより、現場にいなくても施工 することが可能になり、安全性・効率性の向上を含め多様な働き方の実現にもなります
なお、当日の様子は11月21日に当社にて開催します「NITTOCシンポジウム2024」にて紹介します。
シンポジウムの詳細は以下よりご確認ください。
NITTOCシンポジウム2024 ~遠隔・自動施工から描く ダムグラウチング・斜面防災工事の未来~を開催します | 日特建設株式会社

ゲームコントローラーによる遠隔操作の状況。
タブレットに表示されるLiDER計測画面で吹付厚を確認しながら所定の厚さに吹き付けます。
本実証試験では、モルタルではなく植生基材を吹き付けています。
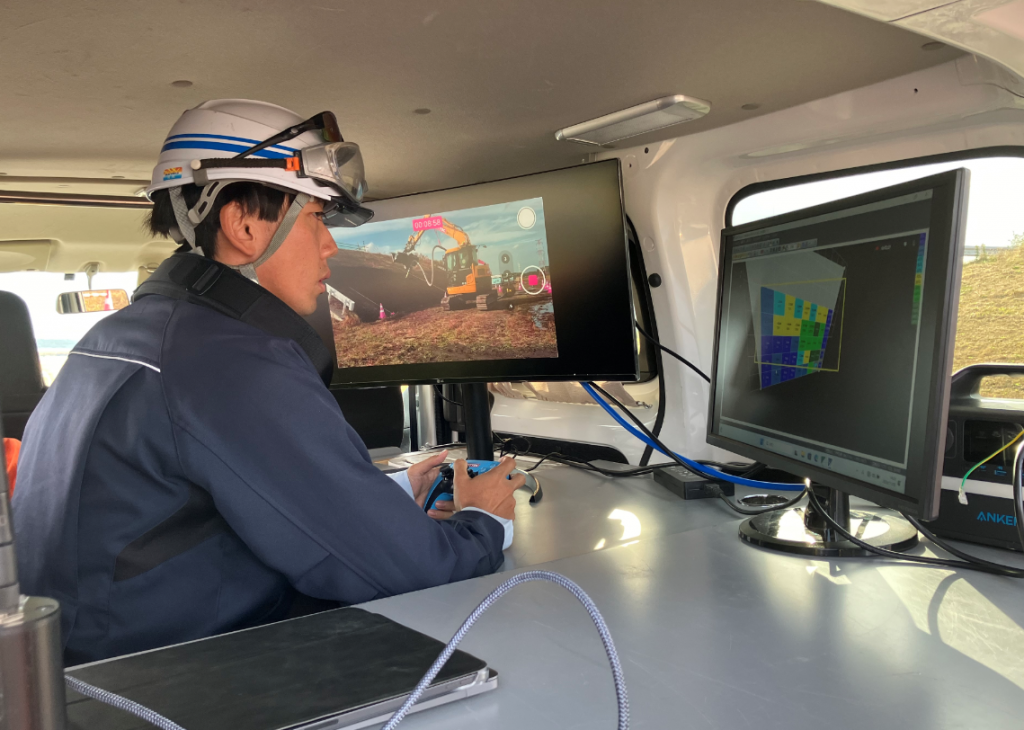
目視外で、映像を見ながら操作することも可能です。
ゲームコントローラを使用した遠隔操作システムは、ARAV(東京都文京区、白久レイエス樹代表取締役)の遠隔操作・自動運転システム「ModelV」を取り入れて構築しました。バックホウの運転席に遠隔操作機器を後付けできます。

吹付の様子。バックホウの運転席は無人です。
※新聞記事掲載については、新聞社の掲載許可をいただいています。